Después de la adquisición exitosa de datos, la evaluación de datos de la nube de puntos se puede realizar con el flujo de trabajo CADdy en el complemento "CADdy V para BricsCAD".
Las nubes de puntos grabadas con el sensor lidar del iPhone se pueden exportar con formatos de archivo conocidos. BricsCAD y el complemento CADdy-V también conocen estos formatos (como PLY, LAS, OBJ) y se pueden leer con unos pocos clics.
La función incorporada BricsCAD-V21 “Insertar -> Adjuntar nube de puntos” se utiliza para visualizar los datos, por ejemplo en formato LAS. La nube de puntos está incrustada en un dibujo DWG con sus coordenadas originales. Se verá así:
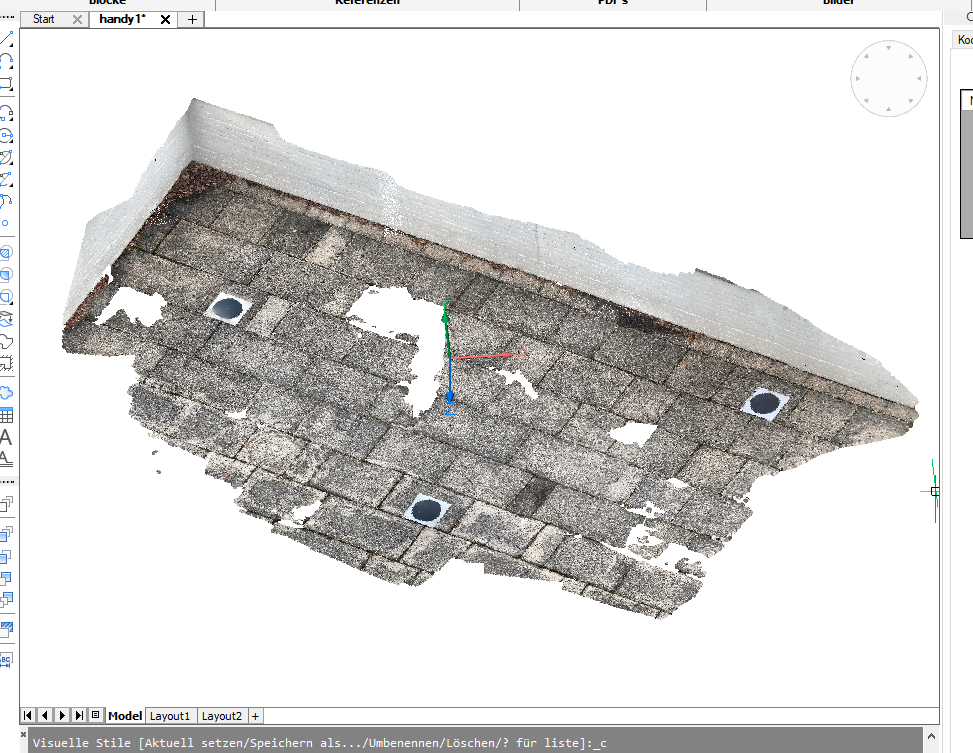
(Datos de muestra registrados con el iPhone 12pro en la terraza de la oficina de Schatzbogen, Munich)
Sin embargo, estos datos aún no están georreferenciados y aquí es donde entra en juego la funcionalidad de transformación del complemento CADdy-V.
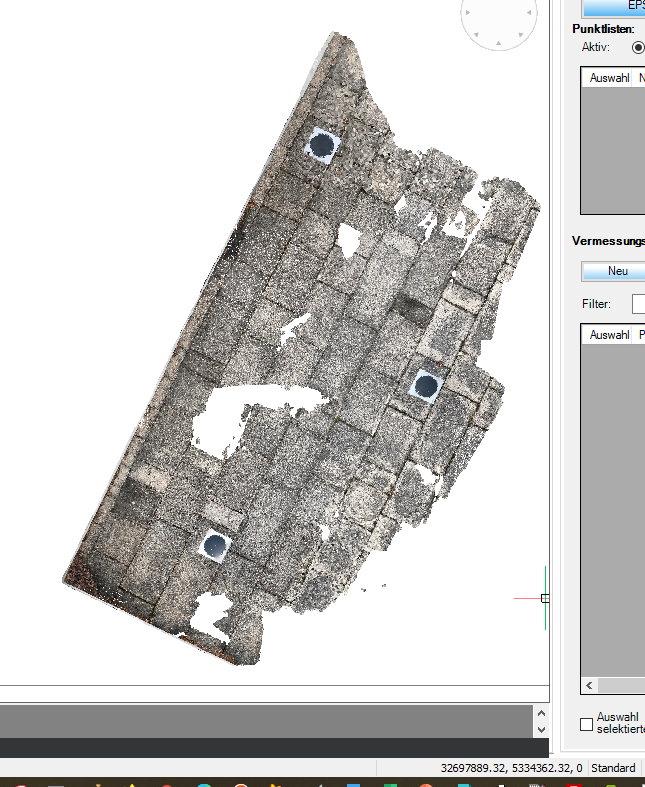
En el ejemplo puede ver unos buenos 3 puntos de control que se pueden registrar rápidamente con precisión centimétrica usando GPS. Para determinar las coordenadas locales que coinciden con los puntos de control, los puntos se pueden digitalizar en el DWG, para este propósito BricsCAD ofrece una cómoda instantánea 3D en puntos de nube de puntos individuales. Los puntos de medición 3D se guardan directamente en la gestión de coordenadas CADdy.
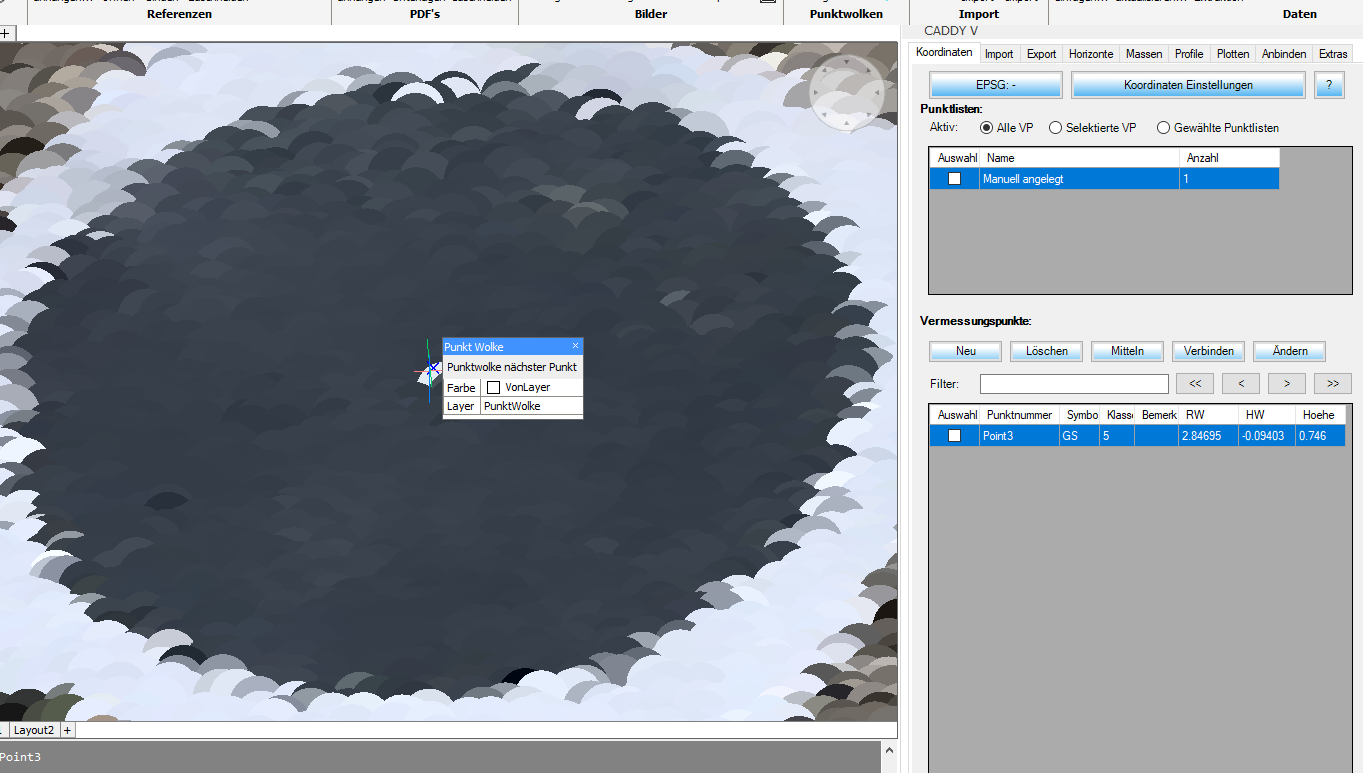
(Digitalice en la nube de puntos / ajuste de puntos 3D con marcador de cruz azul)
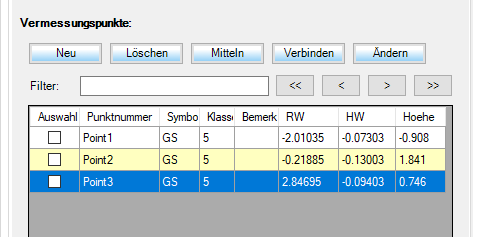
(datos del punto de control local completamente registrados)
Las coordenadas mundiales de los 3 puntos de control (con números de punto idénticos) se guardan en un archivo de coordenadas ASCII, por ejemplo, en formato CADdy-KOR:
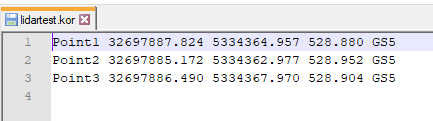
(Datos del punto de control mundial en formato KOR)
La biblioteca de transformación CADdy-V también ofrece una transformación Helmert de 7 parámetros que, después de nuestros preparativos, ahora genera coordenadas mundiales a partir de la nube de puntos local con solo unos pocos clics.
(Interfaz de usuario para transformación de 7 parámetros)
Una vez calculados los parámetros de transformación de Helmert, la transformación se puede aplicar directamente al archivo de nube de puntos generado originalmente por el iPhone (botón “Transformar archivo externo”) y este se puede volver a adjuntar a un DWG, pero esta vez georreferenciado correctamente.
(nube de puntos georreferenciados en coordenadas UTM32)



