Na succesvolle data-acquisitie kan de data-evaluatie van de puntenwolk worden gedaan met de CADdy-workflow in de "CADdy V for BricsCAD" plug-in.
Puntenwolken die zijn opgenomen met de lidarsensor van de iPhone kunnen worden geëxporteerd met bekende bestandsindelingen. Deze formaten (zoals PLY, LAS, OBJ) zijn ook bekend bij BricsCAD en de CADdy-V plug-in en kunnen met een paar klikken worden ingelezen.
De BricsCAD-V21 ingebouwde functie “Invoegen -> Puntenwolk koppelen” wordt gebruikt om de gegevens te visualiseren, bijvoorbeeld in LAS-formaat. De puntenwolk is ingebed in een DWG-tekening met zijn originele coördinaten. Het zal er zo uitzien:
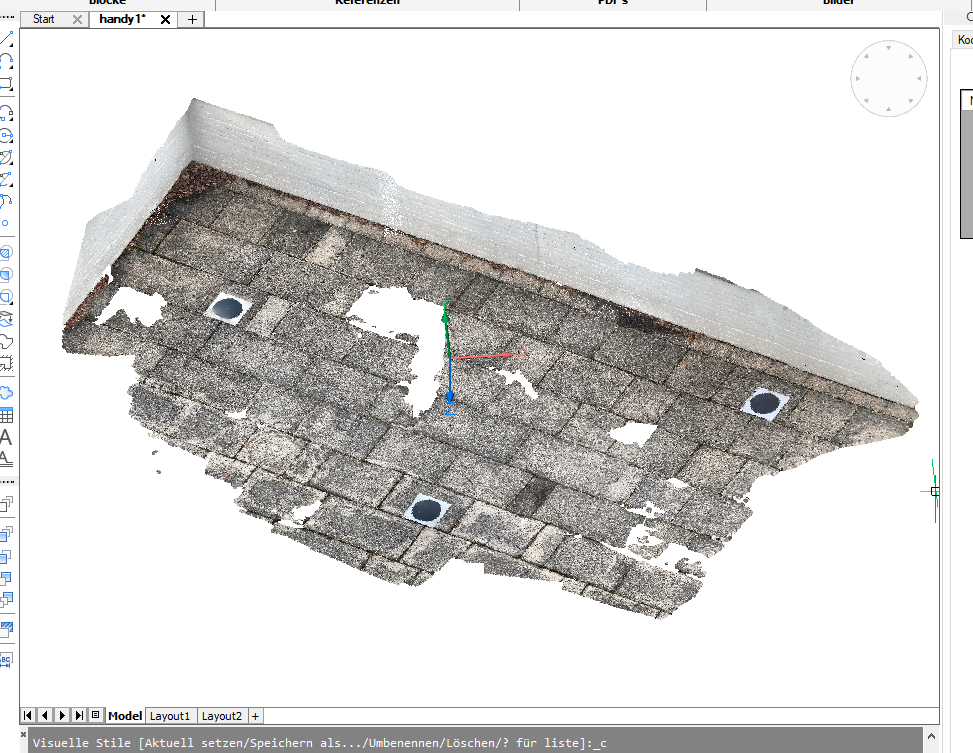
(Voorbeeldgegevens opgenomen met de iPhone 12pro op het Schatzbogen kantoortras, München)
Deze gegevens zijn echter nog niet gegeorefereerd en dit is waar de transformatiefunctie van de CADdy-V-plug-in in het spel komt.
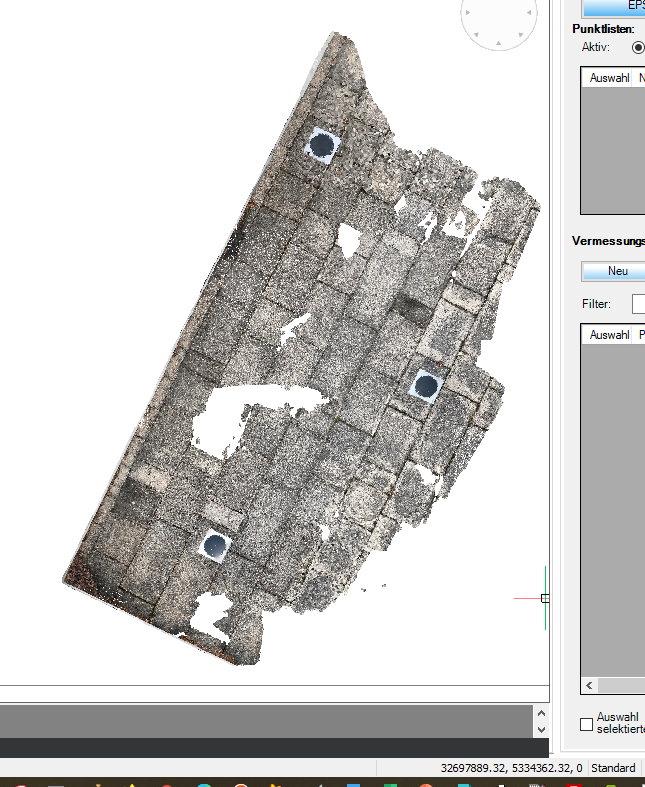
In het voorbeeld zie je maar liefst 3 controlepunten die met GPS snel tot op de centimeter nauwkeurig kunnen worden vastgelegd. Om de lokale coördinaten te bepalen die overeenkomen met de controlepunten, kunnen de punten worden gedigitaliseerd in de DWG, hiervoor biedt BricsCAD een comfortabele 3D-snap op individuele puntenwolkpunten. De 3D-meetpunten worden vervolgens direct opgeslagen in het CADdy-coördinatenbeheer.
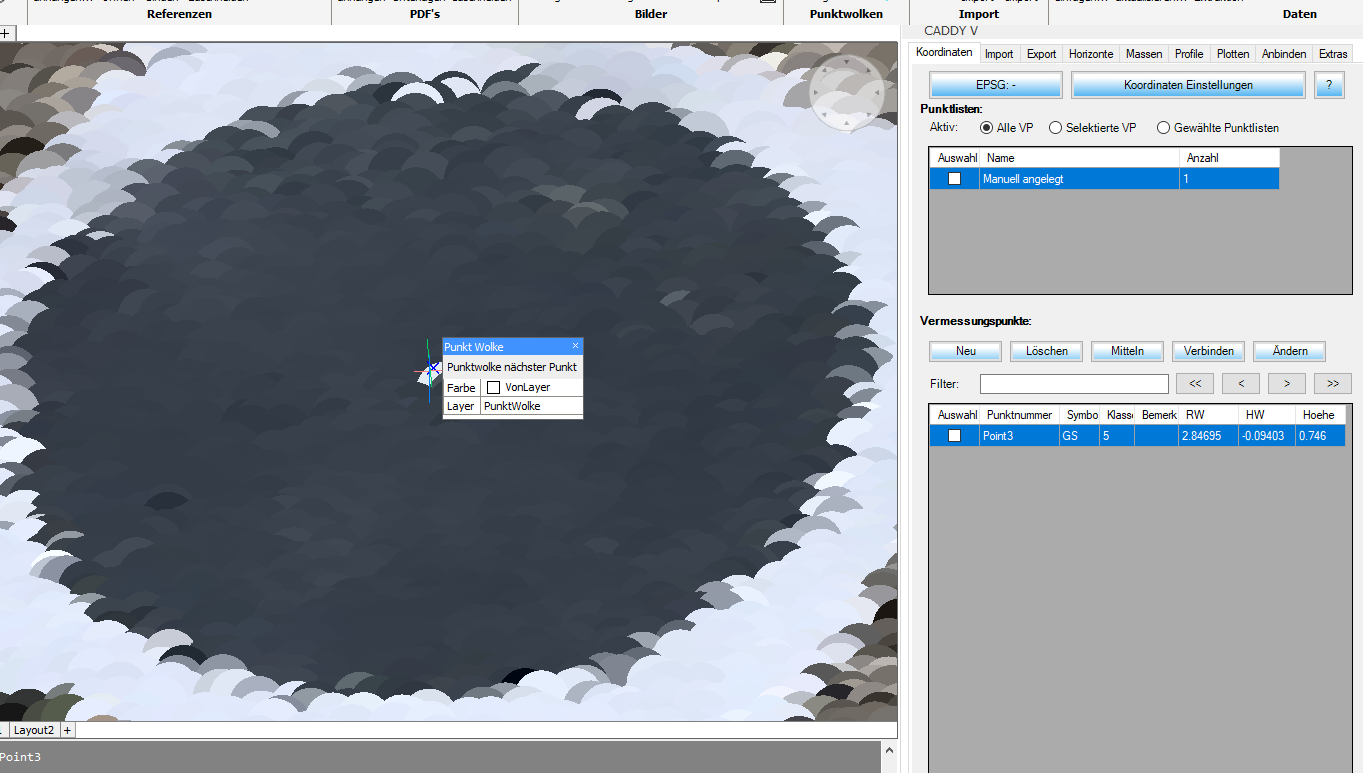
(Digitaliseer in de puntenwolk / 3D-puntmagneet met blauwe kruismarkering)
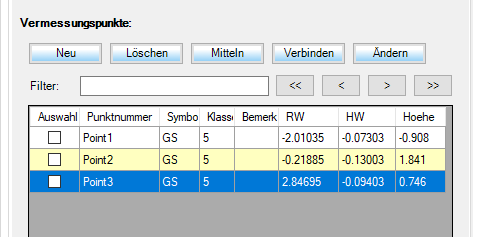
(volledig geregistreerde gegevens van lokale controlepunten)
De wereldcoördinaten van de 3 controlepunten (met identieke puntnummers) worden bewaard in een ASCII-coördinatenbestand, bijvoorbeeld in het CADdy-KOR-formaat:
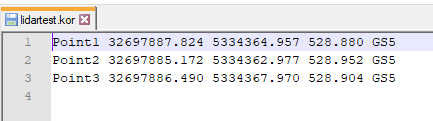
(Gegevens van het wereldcontrolepunt in KOR-formaat)
De CADdy-V-transformatiebibliotheek biedt ook een Helmert-transformatie met 7 parameters die, na onze voorbereidingen, nu met slechts een paar klikken wereldcoördinaten genereert vanuit de lokale puntenwolk.
(Gebruikersinterface voor transformatie van 7 parameters)
Nadat de Helmert-transformatieparameters zijn berekend, kan de transformatie rechtstreeks worden toegepast op het puntenwolkbestand dat oorspronkelijk door de iPhone werd gegenereerd (knop "Transform extern bestand") en dit kan opnieuw worden gekoppeld aan een DWG, maar deze keer correct georeferentieerd.
(puntenwolk met geografische referentie in UTM32-coördinaten)



