Swimming Surveyor X

Die neue Generation des “Swimming Surveyor” haben wir als Webserver entwickelt und damit ist es weltweit, direkt über ein Tablet oder Smartphone bedienbar, egal wo man sich gerade befindet. Über WebCADdy können beliebige Touren geplant und über die mitgelieferte App an das Boot übergeben werden. Alle Messdaten werden zentral gespeichert und können in WebCADdy visualisiert und synchronisiert werden. Auch die Messergebnisse stehen somit sofort weltweit zur Verfügung.

Aber auch technisch wurden einige Verbesserungen eingebaut. Das Stromversorgungssystem wurde überarbeitet und zentralisiert (2-3 Std. Fahrzeit je nach Strömung), das GNSS-System wird nur noch als Mehrfrequenzer (bessere und schnellere Position durch Korrekturdienst z.B. SAPOS) eingebaut und ist optional auch im Base-/Roverbetrieb nutzbar. Störeinflüsse werden so weitgehend verhindert und ein cm genaues Signal ist nahezu überall empfangbar wo eine Internetverbindung besteht.
Selbstverständlich ist das GNSS-System weiterhin als separates Vermessungssystem unabhängig verwendbar. Grundsätzlich liefern wir das Boot mit einer ausführlichen eintägigen Einweisung in die Technik und auch in die Tourenplanung mit WebCADdy aus.
Termine für die Einweisung oder Demo werden individuell abgestimmt.
Technische Details:
Bootsrumpf
Präzisionsmessboot auch für großwellige Gewässer geeignet bestehend aus:
Bootskörper vollständig verschlossen (außer Batteriefächer), ABS Katamaranbauweise, ca. 10kg Gesamtgewicht und somit ohne Hilfsperson einsetzbar, 2 kräftige Motoren mit bis zu 11.000 U/min und passenden Reglern geeignet für Fließgewässer-Betrieb (Ausnahme: starkes Weißwasser), 3-Blatt-Speedschrauben mit Schutzgehäuse und Gleitschlitten.
Stromversorgung
Die Stromversorgung besteht aus 2 Einheiten von LiIonen Akkus, 3S mit 20.000 mAh, auf Wunsch können auch größere Akkus geliefert werden.

RC Remotecontroller (Fernsteuerung)
aktuell verwenden wir eine hochwertige RadioLinkRC für die manuelle Steuerung des Bootes. Dabei kann neben Rechts/Links und vor/zurück auch RTL ausgelöst werden.
Boot-CPU
die Boot-CPU besteht aus einer angepassten Raspberry 4 Version in Verbindung mit einem LTE Stick für den Zugang zum Internet. Bei schlechter oder nicht vorhandener Internetverbindung, kann das Boot via WLAN-Verbindung lokal bedient werden. Die automatische Fahrt wird via Pixhawk 4 mit externem Kompass und GNSS-Empfänger verarbeitet. Die CPU ist vom GNSS getrennt um keine Störstrahlung zu emittieren.
Sonar
Das verbaute Sonar ist fest integriert und direkt mit der CPU verbunden. Aktuell wird ein hochgenaues Airmar – EchoRange™ Single Frequency Smart Transducer verwendet. Das erste Einfrequenzprodukt arbeitet mit 235 kHz. Das Einfrequenzprodukt hat zwei separate Kommunikationsschnittstellen: eine bidirektionale Schnittstelle, die dem NMEA 0183-Protokoll mit RS422 entspricht, und eine reine Übertragungsschnittstelle mit einem proprietären Protokoll mit RS485. Die Arbeitsgenauigkeit beträgt ca. +/- 9cm je nach Umgebungsbedingungen.
GNSS Messeinheit (GPS)
Navigationssystem
Als Navigationssystem wird ein Pixhawk 4 eingesetzt der via Mavlink arbeitet und mit der BoardCPU direkt verbunden ist. Die Navigationsgenauigkeit beträgt je nach Qualität des GPS Signals 1-3 m (je nach Umgebung und Satellitenkonstellation).
WebCADdy Navigator
Mit dem Navigator ist es möglich eine Tour exakt im Browser zu planen und an den Navigationscomputer zu übergeben. Bei der Planung hat man die Möglichkeit verschiedene Hintergrundkarten zu laden (anzubinden) z.B. auch ein eigenes, kurz vorher erzeugtes Luftbild. Damit lassen sich genaueste Tourenplanungen auch in unzureichend erfassten Gewässern erstellen und durchführen.
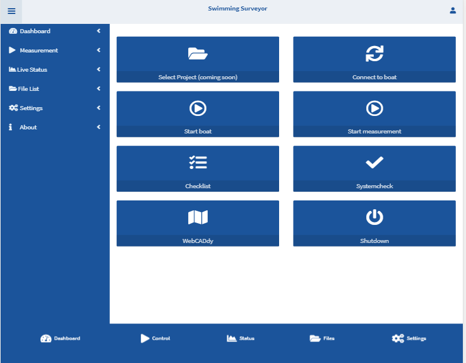
WebCADdy Pilot
Diese App (Webseite) steuert die komplette Bootsinfrastruktur und startet oder beendet den Messvorgang. Über die Synchronisation werden die Daten sofort an das WebCADdy GIS übergeben.